The Design of a Practical System for Fault-Tolerant Virtual Machines
Daniel J. Scales, Mike Nelson, and Ganesh Venkitachalam
ABSTRACT
通过提供故障容错性的虚拟机,我们已经实现了一个商业化的企业级系统,它建立在复制一个主虚拟机的执行过程到另一个服务器上的备份虚拟机的基础上。我们已经在 VMware vSphere4.0 上设计了一个完整的系统,它运行在商业用的服务器上,很容易使用,同时保证了应用的性能仅有少于 10% 的降低。另外,为了让 primary VM 和 secondary VM 的执行活动保持一致,对于几个实际的应用而言,需要的数据带宽少于 20Mbit/s,这也允许实现更长距离的故障容错的可能性。一种容易使用,在故障后能够自动恢复备份的商业化系统,在复制 VM 执行之前需要额外的组件。我们已经设计并且实现了这些额外的组件,并且解决了在支持 VM 运行企业级应用的时候,遇到的许多实际问题。在这篇文章中,我们描述了我们基础的设计,讨论了可替代的设计选择和很多实现的细节,并且针对微基准和真实应用,提供了性能结果。
1. INTRODUCTION
一个实现故障容错服务器的常见方法是主备机制,如果主服务器失败,一个备份服务器总是可以进行接管。在任何时间,备份服务器的状态必须和主服务器几乎保持一致,因此当主服务器失败的时候,备份服务器可以立刻接管,此时对于外部客户端而言,故障就相当于被隐藏了起来,并且不会造成数据丢失。在备份服务器上复制状态的一种方法是将主服务器的所有状态,包括 CPU、memory、IO 设备,连续地送给备份服务器(状态转移)。然而,这种发送状态的方法,尤其是涉及到内存中的变更,其需要的带宽非常大(可以只发送上次同步之后变更了的内存来减少带宽的需求)。
另一种可以用更少带宽复制服务器的方法类似于状态机。这种思路是将服务器建模为确定性的状态机,他们从相同的初始状态开始,并且确保以相同的顺序接收相同的输入请求,这样就能保持同步(复制状态机)。因为大多数服务器或服务有一些不确定性的操作,因此必须使用额外的协调机制来确保主备同步。然而,需要保持主备一致性的额外信息数据,远远少于正在变更的主服务器的状态(主要是内存更新)的数据。
实现协调机制来确保物理服务器的确定性操作是困难的,尤其随着处理器频率增长。反之,一个运行在管理程序(hypervisor)上的 VM,是一个实现状态机方法的很好的平台。一个 VM 可以被当作一个定义好的状态机,它的操作是机器被虚拟化的操作(包括它所有的设备)。和物理服务器一样,VM 有相同的非确定性操作(例如读取时钟或发送中断),因此为了保持同步,额外的信息必须被发送给备份服务器。管理程序(hypervisor)有 VM 的全部控制权利,包括处理所有输入,因此它能够获得所有与主 VM 上的非确定性操作有关的必要信息,并且能正确地重放这些操作。
因此,状态机方法可以通过商业化软件上的 VM 来实现,它不需要硬件更改,允许在最新的微处理器上立刻实现故障容错。另外,状态机方法需要的低带宽允许了主备服务器能更好地进行物理分隔(主备服务器的物理间隔可以更远)。例如,被复制的 VM 可以运行在横跨一个学校的物理机器上,相比于运行在同一建筑内的 VM 而言,可以提供更多的可靠性。
我们在 VMware vSphere 4.0 平台上使用主备机制实现了故障容忍的 VMs,这个平台以一种高度有效的方式,运行着完全虚拟化的 x86 虚拟机。因为 VMware vSphere 实现了一个完整的 x86 虚拟机,所以我们自动地能够为任何 x86 操作系统和应用提供故障容忍。这种允许我们记录一个主服务器执行,并确保备份服务器一致执行的基础技术是确定性重放。VMware vSphere Fault Tolerance(FT) 是基于确定性重放(Deterministic Replay)的,但是为了建立一个完整的故障容忍系统,还增加了必要的额外协议和功能。除了提供硬件故障容忍,我们的系统在一次失败后,通过在局部集群中任何可接受的服务器上开始一个新的备份虚拟机,进行自动地存储备份。目前确定性重放和 VMare FT 的产品版本只支持单处理器的 VMs。多处理器 VM 的操作记录和重放还在开发中,因为每个共享内存的操作都是一个非确定性的操作,因此还有重要的性能问题待解决(当多个处理器同时访问共享内存时,操作记录和重放的实现需要保证所有处理器对共享内存的操作顺序是一致的,这就需要对共享内存的访问进行同步和序列化处理,以确保重放时的正确性。然而,这种同步和序列化处理会对虚拟机的性能产生较大的影响,特别是在多处理器环境下,由于需要处理更多的并发访问,因此会导致操作记录和重放的性能下降)。
Bressoud 和 Schneider 描述了一个针对 HP PA-RISC 平台的故障容忍 VMs 的原型实现。我们的方法是相似的,但是出于性能原因,以及在调查了许多可替代设计后,我们已经做了一些基础性的改变。另外,为了建立一个完整的系统,而这个系统是有效的并且能够被正在运行企业级应用的客户使用,我们已经设计并实现了系统中许多额外的组件,可以处理许多实际问题。与大多数其他实际系统讨论的类似,我们只尝试应对 fail-stop 的故障,这是一种服务器故障,可以在故障服务器造成一次不正确的外部可见行为之前被检测。(Hades注:fail-stop故障指的是,如果某些东西出现故障,只是单纯的停止运行,而不是运算出错误结果。比如电源线、服务器风扇导致 CPU 过热停止运行、网络等故障)(不正确的外部行为指系统或应用程序在发生故障或异常情况时,所表现出来的不符合预期的行为或结果,这种行为或结果可以被外部用户或系统观察到,从而影响系统的正确性、可用性和安全性)
本文的其余部分按照以下方式组织。首先,我们描述了基本设计并详细介绍了我们的基本协议,以确保在主 VM 失败后备份 VM 接管时不会丢失任何数据。然后,我们详细介绍了必须解决的许多实际问题,以构建一个强大、完整和自动化的系统。我们还描述了实现容错 VM 时出现的几个设计选择,并讨论了这些选择中的权衡。接下来,我们给出了我们的实现在一些基准测试和一些真实企业应用程序中的性能结果。最后,我们描述相关工作并作出结论。
2. BASIC FT DESIGN
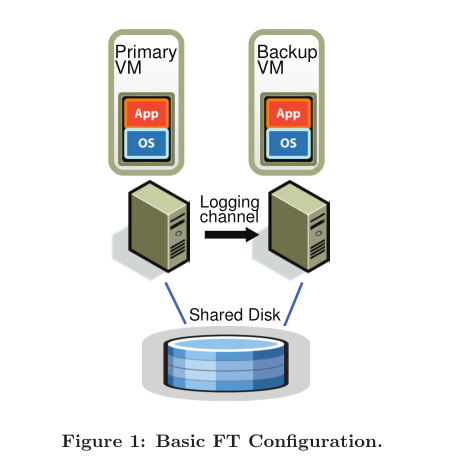
图 1 展示了我们系统在故障容忍 VMs 的基本步骤。对于一个给定的 VM,我们希望提供故障容忍(主 VM),我们在一个完全不同的物理机器上运行一个备份 VM,保持和主 VM 同步并且执行一致,虽然存在短时间的滞后。我们说这两个 VMs 处于 virtual lock-step 的状态。虚拟机的虚拟磁盘存储在共享存储设备上(例如 Fibre Channel 或 iSCSI 磁盘阵列),因此主 VM 和备份 VM 都可以访问这些磁盘,进行输入和输出操作。(我们将在 4.1 节中讨论基于分离的的非共享虚拟磁盘的主备 VM 的设计)只有主 VM 会说明它在网络中的存在,因此所有网络输入都会来到主 VM 上。相似地,所有其他输入(例如键盘和鼠标)也只会来到主 VM 上。
所有主 VM 接收到的输入都会通过名为 logging channel 的网络连接,发送到备份 VM 上。对于几个工作负载而言,主要的输入途径是网络和磁盘。为了保证备份 VM 和主 VM 使用相同的方式执行非确定性操作,下面 2.1 节讨论的额外的信息也需要发送。结果备份 VM 总是能够执行和主 VM 一致的操作。然而,备份 VM 的输出会被管理程序丢弃掉,因此只有主 VM 产生实际输出,并被返回给客户端。和 2.2 节中描述的一样,为了确保主 VM 失败后没有数据丢失,主备 VM 遵循一个具体的协议,包括备份 VM 显示地确认信息。
为了检测主/备份虚拟机是否失败,我们的系统既使用服务器间的心跳机制,同时也监测 logging channel 上的流量。另外,我们我们必须确保只有主或备份 VM 执行操作,即使存在脑裂(split brain)的场景,在这种场景中主备 VM 互相之间会失去通信。
在下面的小节中,我们在几个重要的方面提供更多的细节。在 2.1 节中,我们给出一些确定性重放技术的细节,保证主备 VMs 通过 logging channel 上的信息保持一致。在 2.2 节中,我们描述了我们的 FT 协议中的一个基础规则,保证了主 VM 失败后备份 VM 接管时没有数据丢失。在 2.3 节中,我们描述我们的方法,它能够通过正确的方式检测及响应故障。
2.1 Deterministic Replay Implementation
正如我们所提到的,复制服务器(或 VM)执行可以建模为确定状态机的复制。如果两个确定性的状态机以相同的初始状态开始,并且以相同的顺序在相同的时间看到相同的输入,那么它们将经历相同的状态序列并且产生相同的输出。一个虚拟机有很广泛的输入,包括到来的网络数据包,磁盘读,以及来自键盘和鼠标的输入。非确定性事件(例如虚拟中断)和非确定性操作(例如处理器的时钟周期计数器)也会影响虚拟机的状态。这对于复制运行任何操作系统和工作负载的 VM 的执行提出了三个挑战:
- 为了保证一个备份 VM 的确定性执行,正确地得到所有输入以及非确定性是必要的。
- 正确地将输入与非确定性应用到备份 VM 上。
- 以一种不会引起性能下降的方式执行。
另外,许多在 x86 处理器上的复杂操作还未被定义,因此会引起非确定性以及副作用。捕获这些未定义的操作并且重放它们产生相同的状态是一个额外的挑战。
针对在 VMare vSphere 平台上的 x86 虚拟机,VMware 的确定性重放恰好提供了这个功能。确定性重放记录 VM 的输入以及与 VM 执行相关的所有可能的不确定性因素到日志条目中,这些条目会被写入日志文件,在读取日志文件中的条目后,VM 操作会被精确地重放。 对于非确定性操作,需要记录足够的信息以允许使用相同的状态变更和输出再现操作。 对于非确定性事件,例如定时器或 IO 完成中断,事件发生的确切指令也会被记录下来(严格来说是指令序号)。 在重放期间,非确定性事件被传递在指令流中的同一位置。 VMware 确定性重放采用各种技术,实现了高效的事件记录和事件传递机制,包括使用 AMD[2] 和英特尔[8] 联合开发的硬件性能计数器。
Bressoud 和 Schneider[3] 提到将 VM 执行切分成不同的时代(epoch)(虚拟机的执行被分成多个 epoch,每个 epoch 有特定的任务和行为,并且在 epoch 之间进行确定性的转换),其中非确定性事件,例如中断仅在一个 epoch 结束时传递(可以将非确定性事件的处理延迟到 epoch 结束时,从而减少在每个指令处传递中断的成本)。 epoch 的概念似乎被用作批处理机制,因为在它发生的确切指令处单独传递每个中断的成本太高。然而,我们的事件传递机制足够高效,以至于 VMware 确定性重放不需要使用 epoch。 每次中断在发生时被记录,并且在重放时有效地传递到适当的指令处。
2.2 FT Protocol
对于 VMware FT 而言,我们使用确定性重放来生成必要的日志条目来记录主 VM 的执行情况,但是不是将日志条目写入磁盘,而是通过日志通道将它们发送到备份 VM。备份 VM 实时重放日志条目,因此与主 VM 的执行保持一致。 然而,我们必须在日志通道中使用严格的 FT 协议以增强日志条目,从而确保我们实现故障容忍。 我们的基本要求如下:
输出要求:如果备份 VM 在主 VM 发生故障后接管,备份 VM 将继续执行,这种执行方式与主 VM 发送到外部世界的所有输出完全一致。(这里的意思是当备份 VM 接管后,客户端不会从备份 VM 得到非预期的结果或者说备份 VM 的状态不能落后于客户端。)
请注意,发生故障转移后(即主 VM 失败后备份 VM 接管),由于执行期间发生的许多非确定性事件,备份 VM 开始执行的方式可能与主 VM 相当不同。但是,只要备份 VM 满足输出要求,故障转移到备份 VM 期间不会丢失任何外部可见状态或数据,客户端也不会注意到服务发生的中断或不一致。
可以通过延迟任何外部输出(通常是网络数据包)直到备份 VM 已经收到重放所需的所有信息来满足输出要求,这些信息允许它至少执行到该输出操作的点。一个必要条件是备份 VM 必须接收到输出操作之前生成的所有日志条目。这些日志条目将允许它执行到最后一个日志条目的点。但是,假设失败是在主 VM 执行输出操作后立即发生。备份 VM 必须知道它需要继续重播到输出操作点,并且到那时才“上线”(停止重播并作为主 VM 接管,如 2.3 节所述)。如果备份 VM 在输出操作点之前的一个日志条目点上线(过早上线),一些非确定性事件(例如计时器传递给 VM 的中断)可能会在执行输出操作之前改变其执行路径(这里的意思是非确定事件可能会导致备份 VM 产生非预期的输出)。
给定上述的限制,强制满足输出要求的最容易的方式是在每个输出操作处创建一个特殊的日志条目。然后,输出要求被下面特殊的规则限制:
输出规则:主 VM 不能发送一个输出到外部世界,直到备份 VM 已收到并确认与输出操作关联的日志条目。
如果备份 VM 已收到所有日志条目,包括生成输出操作的日志条目,然后备份 VM 将能够准确地重现主 VM 在输出点的状态,所以如果主 VM 死了,备份 VM 将正确地到达一个与输出一致的状态。相反,如果备份 VM 在没有收到所有必要的日志条目的情况下接管,那么它的状态可能会发生分歧,以至于与主 VM 的输出不一致。输出规则在某些方面类似于 [11] 中描述的方法,其中“外部同步” IO 实际上可以被缓存,只要它在下一次外部通信之前确实被写入磁盘了。
请注意,输出规则没有说明关于停止主 VM 执行的任何事情。我们只需要延迟输出的发送,但 VM 本身可以继续执行。由于操作系统通过异步中断来指示完成,因此可以执行非阻塞的网络和磁盘输出,VM 可以轻松地继续执行并且不一定会立即受到输出延迟的影响。相比之下,以前的工作 [3, 9] 通常必须在执行输出之前完全停止主 VM,直到备份 VM 确认收到主 VM 的所有必要信息。
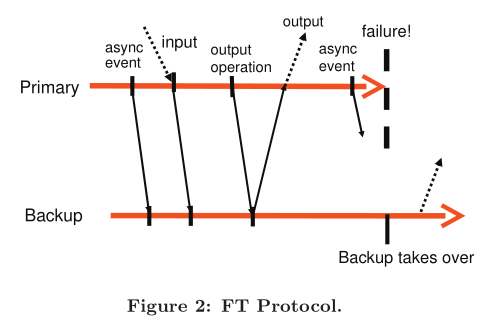
作为一个例子,我们在图 2 中展示了 FT 协议的需求。该图显示了一个主 VM 和备份 VM 上的事件时间线。从主 VM 时间线到备份 VM 时间线的箭头表示日志条目的传输,从备份 VM 时间线到主 VM 时间线的箭头表示确认。有关异步事件、输入和输出操作的信息必须作为日志条目发送到备份 VM 并确认。如图所示,到外部世界的输出被延迟,直到主 VM 收到来自备份 VM 的确认,即确认备份 VM 已经收到与输出操作相关的日志条目。鉴于遵循输出规则,备份 VM 将能够以这样一种状态接管,即与主 VM 最后的输出一致。
我们无法保证在故障转移情况下所有输出都准确地产生一次。当主 VM 打算发送输出时,如果不使用具有两阶段提交的事务,那么备份 VM 无法确定主 VM 是在发送其最后一个输出之前还是之后立即崩溃。幸运的是,网络基础架构(包括常用的 TCP)旨在处理丢失的数据包和相同(重复的)数据包。请注意,主 VM 的传入数据包在主 VM 故障期间也可能会丢失,因此不会传递到备份 VM。但是,传入的数据包可能会由于与服务器故障无关的原因而被丢弃,因此网络基础架构、操作系统和应用程序都编写了确保它们可以弥补丢失数据包的功能(?不懂)。
2.3 Detecting and Responding to Failure
如上所述,如果另一个 VM 出现故障,主备 VMs 必须快速响应。如果备份 VM 出现故障,主 VM 将上线,即离开记录模式(因此停止发送条目到日志通道)并开始正常执行。如果主 VM 失败,备份 VM 应该同样上线(go live),但过程更为复杂。由于其执行的滞后,备份 VM 可能会有许多它已收到并确认,但尚未执行的日志条目。备份 VM 必须继续重放日志条目,直到它执行完了最后一个日志条目。此时,备份 VM 将停止重放模式并开始作为正常 VM 执行。本质上备份 VM 被提升为主VM(现在缺少备份 VM)。由于它不再是备份 VM,当操作系统执行输出操作时,新的主 VM 现在将向外部世界产生输出。在过渡到正常模式期间,可能会有一些特定设备的操作需要允许正确地发送输出。特别是,出于联网目的,VMware FT 自动在网络上通告新的主 VM 的 MAC 地址,以便物理网络交换机知道新的主 VM 所在的服务器。此外,新提升的主 VM 可能需要重做一些磁盘 IO(如第 3.4 节所述)。
有许多可能的方法来尝试检测主备 VMs 的故障。VMware FT 在运行容错 VMs 的服务器之间使用 UDP 心跳,来检测服务器何时崩溃。此外,VMware FT 监控日志流量,包括从主 VM 到备 VM 的日志条目的发送以及从备 VM 到主 VM 的确认。因为定时器中断(定时器中断是非确定事件,因此也需要通过日志条目的方式发送给备份 VM),日志流量应该是有规律的,并且永远不会停止。因此,日志条目或确认流中的中断可能表明 VM 发生了故障。如果 UDP 心跳或日志流量已停止超过特定超时时间(大约几秒钟),就可能发生故障了。
但是,任何此类故障检测方法都容易受到脑裂(split brain)问题的影响。如果备份服务器停止接收来自主服务器的心跳,这可能表明主服务器出现故障,或者可能只是意味着所有仍在运行的服务器之间的网络连接丢失。如果备份 VM 随后上线,而主 VM 也仍然在运行,对于与 VM 通信的客户端而言可能会有数据损坏以及其他问题。因此,我们必须确保当检测到故障时,主 VM 和备份 VM 只有一个在线。为了避免脑裂问题,我们利用共享存储,来存储 VM 的虚拟磁盘。 当主 VM 或备份 VM 想要上线时,它会在共享存储中执行一个原子性的测试设置操作。 如果操作成功,VM 被允许上线。 如果操作失败,那么另一个 VM 一定已经上线,所以当前虚拟机实际上会停止自己(“自杀”)。 如果尝试执行此原子操作时,VM 无法访问共享存储,然后它只是等待,直到可以访问。 注意如果由于存储网络上的某些故障而无法访问共享存储时,那么虚拟机可能无法做有用的工作,因为虚拟磁盘在同样的共享存储中,因此,为了解决脑裂问题而使用共享存储不会引入任何额外的不可接受性。(Hades注:使用共享存储这种解决方案本身使得主备又得以通信了,只不过是通过信号量,而非 socket。)
这个设计的一个最终方面是一旦故障发生并且一个 VM 已经上线,VMware FT 自动地通过在另一个物理服务器上开始一个新的备份 VM,来恢复备份。虽然这个过程不能覆盖过去大部分的工作,但是对于故障容忍的 VM 有用,它是基础,需要仔细设计。 更多细节是在第 3.1 节中给出。
3. PRACTICAL IMPLEMENTATION OF FT
第二节描述了我们基础的设计以及 FT 协议。然而,为了创建一个有用的、健壮的以及自动化的系统,有许多其他组件必须设计实现。
3.1 Starting and Restarting FT VMs
必须设计的最大额外组件之一是启动备份 VM 并使其处于与主 VM 相同的状态的机制。在发生故障后重启一个备份 VM 时也将使用此机制。因此,这个机制必须适用于处于任意状态(即不仅仅是启动状态)的正在运行的主 VM。此外,我们希望这个机制不会显著干扰主 VM 的执行,因为这将影响所有 VM 的当前客户端。
对于 VMware FT 而言,我们调整了 VMware vSphere 上现有的 VMotion 功能。 VMware VMotion[10] 允许以最少中断的方式,将正在运行的 VM 从一台服务器迁移到另一台服务器,VM 的暂停时间通常不到一秒钟。我们创建了一个 VMotion 的修改形式,可在远程服务器上创建准确的 VM 运行副本,但不会破坏本地服务器的虚拟机。也就是说,我们修改后的 FT VMotion 将 VM 克隆到远程主机上而不是迁移它。 FT VMotion 还设置了一个日志记录通道,并让源 VM 作为主 VM 进入日志记录模式,而目的 VM 作为备份 VM 进入重放模式。像平常的 VMotion 一样,FT VMotion 通常会中断主 VM 的执行不到一秒。因此,在正在运行的 VM 上启用 FT 是一个简单的、无中断的操作。
启动备份 VM 的另一个方面是选择一个服务器来运行它。容错 VM 在可以访问共享存储的服务器集群中运行,因此所有 VM 通常可以在集群中的任何服务器上运行。这种灵活性使 VMware vSphere 能够在一个或多个服务器故障时恢复 FT 冗余。VMware vSphere 实现了一个集群服务,用于维护管理和资源信息。当发生故障并且主 VM 现在需要一个新的备份 VM 来重新建立冗余时,主 VM 会通知集群服务需要一个新的备份。集群服务根据资源使用和其他约束条件确定运行备份 VM 的最佳服务器,并调用 FT VMotion 来创建新的备份 VM。结果是,VMware FT 通常可以在服务器故障后的几分钟内重新建立 VM 冗余,而且完全不会对容错 VM 的执行产生任何明显的中断。
3.2 Managing the Logging Channel
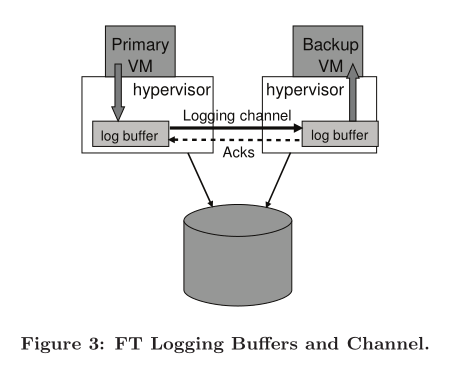
在管理日志通道上的流量时,有许多有趣的实现细节。在我们的实现中,管理程序为主备 VM 的日志记录条目维持了一个大的缓冲区。当主 VM 执行时,它生成日志条目到缓冲区中,类似地,备份 VM 从它的日志缓冲区中消耗日志条目。主 VM 日志缓冲区的内容会被尽快刷新到日志记录通道,这些日志条目一旦到达日志通道,就会被读取到备份 VM 的日志缓冲区。备份 VM 每次从网络上读取一些日志条目到它的日志缓冲区时,都会发送确认返回给主 VM(也就是说除了与输出操作关联的日志条目,其他类型的日志条目也会发送确认信息)。这些确认允许 VMware FT 确定一个被输出规则延迟的输出何时可以被发送。图 3 说明了这个过程。
如果备份 VM 在需要读取下一个日志条目时,遇到空的日志缓冲区,它将停止执行直到有新的日志条目可用(这样可以保证备份 VM 执行的指令不会超过主 VM,导致备份 VM 可能无法在指令流中的相同位置执行来自主 VM 同步的非确定型操作/事件)。由于备份 VM 是不与外部通信的,此暂停不会影响任何 VM 的客户端。同样地,当主 VM 需要写入一个日志条目时,如果主 VM 遇到一个完整的日志缓冲区,它必须停止执行,直到可以刷新日志条目。这种执行的停止是一种自然的流控制机制,当主 VM 生产日志条目太快了,它会减慢主 VM。但是,此暂停可能会影响 VM 的客户端,因为主 VM 将完全停止并且无响应,直到它可以记录其条目并继续执行。因此,我们的实现必须设计为尽量减少主日志缓冲区填满的可能性。
主日志缓冲区可能填满的原因之一是备份 VM 执行速度太慢,因此消耗日志条目太慢。一般来说,备份 VM 必须能够以与记录执行的主 VM 大致相同的速度重放执行。幸运的是,在 VMware 确定性重放中,记录和重放的开销大致相同。然而,如果由于其他 VMs,托管备份 VM 的服务器负载很重(因此过度使用资源),备份 VM 可能无法获得足够的 CPU 和内存资源,来与主 VM 一样快地执行,尽管备份管理程序的 VM 调度器已经尽了最大努力。
除了避免日志缓冲区填满而导致意外暂停之外,我们不希望执行滞后变得过大还有另一个原因。如果主 VM 发生故障,备份 VM 必须通过重播其已经确认的所有日志条目来“追赶”主 VM,然后才能启动并开始与外部世界通信。完成重放的时间基本上是在故障点处的执行滞后时间,因此备份 VM 启动所需的时间大致等于故障检测时间加上当前的执行滞后时间。因此,我们不希望执行滞后时间过大(超过一秒),因为这将显著增加故障切换时间(在故障切换期间,客户端无法得到任何响应,因此我们不希望备份 VM 执行滞后变得过大)。
因此,我们有一种额外的机制来减缓主 VM 的执行速度,以防止备份 VM 落后太多。在我们的日志条目发送和确认协议中,我们发送附加信息以确定主 VM 和备份 VM 之间的实时执行滞后情况。通常,执行滞后小于 100 毫秒。如果备份 VM 开始出现显著的执行滞后(比如超过 1 秒),VMware FT 开始通过通知调度程序给主 VM 分配略小一些的 CPU(最初只减少几个百分点)来减缓主 VM 的执行速度。我们使用一个缓慢的反馈循环,逐步确定适当的 CPU 限制,以使主 VM 能够让备份 VM 匹配其执行。如果备份 VM 继续落后,我们继续逐步降低主 VM 的 CPU 限制。反之,如果备份 VM 赶上来了,我们逐步增加主 VM 的 CPU 限制,直到备份 VM 恢复到略有滞后的状态。
请注意,这种减慢主 VM 的情况非常少见,通常只会在系统处于极端压力下时发生。第 5 节中的所有性能数据都包括任何此类减慢主 VM 的成本。
3.3 Operation on FT VMs
另一个实际问题是处理可能应用于主 VM 的各种控制操作。例如,如果明确关闭主 VM,则备份 VM 也应该停止,而不是尝试上线。另一个例子是,对主 VM 进行的任何资源管理更改(例如增加 CPU 份额)也应该应用于备份 VM。对于这些类型的操作,通过日志通道从主 VM 发送特殊的控制条目到备份 VM,以便在备份 VM 上执行适当的操作。
通常,对 VM 的大多数操作应该仅在主 VM 上初始化。然后,VMware FT 会发送任何必要的控制条目以在备份 VM 上引起适当的更改(这里的意思应该是初始化操作也应该通过复制的方式执行)。唯一可以在主 VM 和备份 VM 上独立完成的操作是 VMotion。也就是说,主 VM 和备份 VM 可以分别迁移到其他服务器。请注意,VMware FT 确保不会将任何一个 VM 迁移到另一个 VM 所在的服务器,因为那样的情况将不再提供容错。
(?没看懂)主 VM 的 VMotion 相比普通 VMotion 增加了一些复杂性,因为备份 VM 必须在适当的时间从源主 VM 断开连接并重新连接到目标主 VM。备份 VM 的 VMotion 存在类似的问题,但增加了一点额外的复杂性。对于普通 VMotion,我们要求在 VMotion 完成的最后切换时暂停(完成)所有未完成的磁盘 IO。对于主 VM,这种暂停很容易通过等待物理 IO 完成并将这些完成结果传递给 VM 来处理。然而,对于备份 VM,没有简单的方法可以在任何所需的时间点完成所有 IO,因为备份 VM 必须重放主 VM 的执行并在相同的执行点完成 IO。主 VM 可能正在执行一个工作负载,其中在正常执行期间始终存在磁盘 IO。VMware FT 具有解决此问题的独特方法。当备份 VM 处于 VMotion 的最后切换点时,它通过日志通道请求主 VM 临时暂停所有 IO。备份 VM 的 IO 也将在重放主 VM 的暂停操作执行时自然暂停在单个执行点上。
3.4 Implementation Issues for Disk IOs
与磁盘 IO 相关的有许多微妙的实现问题。首先,由于磁盘操作是非阻塞的,因此可以并行执行,同时访问相同磁盘位置的磁盘操作可能导致不确定性(并发访问相同磁盘位置的磁盘操作的执行顺序是非确定性的)。此外,我们的磁盘 IO 实现直接使用 DMA 从虚拟机的内存中进行传输,因此同时访问相同内存页的磁盘操作也可能导致不确定性(这里的意思也是一样的,并发访问相同内存也的磁盘操作的执行顺序也是非确定性的)。我们的解决方案通常是检测到这种 IO 竞争(很少见),并强制这些竞争磁盘操作在主备份 VM 上以相同的方式顺序执行(强制将这种并发的 IO 操作序列化)。
第二,磁盘操作也可能与虚拟机中的应用程序(或操作系统)的内存访问发生竞争,因为磁盘操作通过 DMA 直接访问虚拟机的内存。例如,如果虚拟机中的应用程序/操作系统在读取内存块时,同时对该块进行磁盘读取(即磁盘操作可能会和应用程序同时访问相同的内存页),则可能会产生不确定的结果。这种情况也不太可能发生,但如果发生,我们必须检测并处理它。一种解决方案是在磁盘操作的目标页面上临时设置页面保护。在作为磁盘操作目标的页面上。如果 VM 碰巧访问一个页,同时该页面也是磁盘操作的目标,页保护将导致一个陷阱,并且虚拟机可以暂停,直到磁盘操作完成。因为更改页面上的 MMU 保护是一项昂贵的操作,所以我们选择使用跳跃缓冲区(Bounce Buffer)。跳跃缓冲区是一个临时缓冲区,大小与磁盘操作访问的内存相同。磁盘读取操作被修改为将指定数据读取到跳跃缓冲区,并且仅在 IO 完成时将数据复制到客户机内存(这里的意思应该是将数据从 bounce buffer 拷贝到虚拟机内存的操作是由 VMM 完成的,因为 VMM 知道关于虚拟机的所有事情,所以它不会将数据拷贝到正在被应用程序操作的内存空间,也就不会发生竞争了)。类似地,对于磁盘写操作,要发送的数据首先被复制到跳跃缓冲区,然后修改磁盘写操作以从跳跃缓冲区写入数据。使用跳跃缓冲区可能会减慢磁盘操作,但我们没有看到它会导致任何明显的性能损失。
第三,当发生故障,备份 VM 接管主 VM 时,与主 VM 上未完成的磁盘 I/O 相关的一些问题需要解决。新上线的主 VM 无法确定磁盘 I/O 是否已经发出或成功完成。此外,由于备份 VM 上不会真正地进行磁盘 I/O 操作,因此在新上线的主 VM 继续运行时,它们将没有明确的 I/O 完成信息(即不知道 磁盘 IO 是否已经完成),这最终会导致 VM 中的客户操作系统启动中止或重置过程(这里的意思应该是客户操作系统必须要知道磁盘 IO 的完成信息才能继续运行,否则就中止或重置整个 IO 过程)。我们可以发送一个 error 完成,表明每个 IO 都失败了,因为即使 IO 成功完成,返回错误也是可以接受的。但是,客户操作系统可能无法很好地对本地磁盘的错误进行响应。相反,在备份 VM 的上线过程中,我们会重新发出暂停的的 IO。因为我们已经消除了所有竞争,并且所有 I/O 直接指定了访问的内存和磁盘块,所以即使它们已经成功完成(即它们是幂等的),这些磁盘操作也可以被重新发出(即重新执行所有的 IO 操作)。
3.5 Implementation Issues for Network IO(?没看懂)
VMware vSphere 为 VM 网络提供了许多性能优化。其中一些优化是基于管理程序异步更新 VM 网络设备的状态。例如,接收缓冲区可以由管理程序在 VM 执行时直接更新。不幸的是,这些对 VM 状态的异步更新增加了不确定性。除非我们可以保证所有更新在主 VM 和备份 VM 的指令流中的相同点发生,否则备份 VM 的执行可能会偏离主 VM 的执行。
为 FT 进行的网络仿真代码最大的更改是禁用异步网络优化。异步更新 VM 环形缓冲区的代码已被修改,以强制让客户机陷入管理程序,然后管理程序可以记录并更新到 VM。同样,通常异步地从传输队列中拉取数据包的代码对于 FT 来说是禁用的,而是通过陷入管理程序来完成传输(如下所述)。
消除网络设备的异步更新,结合在第 2.2 节中描述的发送数据包的延迟,为网络性能带来了一些挑战。我们采用了两种方法来提高运行 FT 时的 VM 网络性能。首先,我们实施了集群优化以减少 VM 陷阱和中断。当 VM 以足够的比特率传输数据时,管理程序可以对一组数据包执行一个传输陷阱,在最佳情况下,可以执行零个陷阱,因为它可以在接收新数据包的过程中传输数据包。同样,管理程序可以通过只对一组数据包发布中断来减少对 VM 的中断次数。
我们对网络的第二个性能优化涉及减少传输数据包的延迟。如前所述,管理程序必须将所有传输的数据包延迟,直到从备份 VM 获得相应的日志条目的确认。减少传输延迟的关键是减少将日志消息发送到备份 VM 并获取确认所需的时间。在这方面,我们的主要优化涉及确保发送和接收日志条目及确认都可以在不进行任何线程上下文切换的情况下完成。VMware vSphere 管理程序允许将函数注册到 TCP 堆栈,每当接收到 TCP 数据时,将从延迟执行的上下文(类似于 Linux 中的 tasklet)调用这些函数。这使我们能够在备份 VM 上快速处理任何传入的日志消息,并在主 VM 上接收任何确认消息,而无需进行线程上下文切换。此外,当主 VM 将数据包排入队列以进行传输时,我们通过安排延迟执行上下文来强制立即刷新关联的输出日志条目(如第 2.2 节所述)。
4. DESIGN ALTERNATIVES
在我们 VMware FT 的实现中,我们已经探索了许多有趣的替代设计。在这节中,我们探索一些替代设计。
4.1 Shared vs. Non-shared Disk
在我们默认的设计中,主 VM 和备份 VM 共享相同的虚拟磁盘。因此,如果发生故障转移,共享磁盘的内容自然是正确的和可用的。实际上,共享磁盘被认为是主 VM 和备份 VM 之外的外部设备,因此对共享磁盘的任何写操作都被视为对外部世界的通信。因此,只有主 VM 实际对磁盘进行写操作,并且对共享磁盘的写操作必须按照输出规则进行延迟。
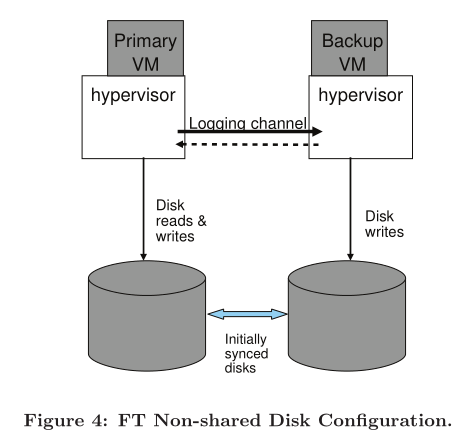
另一种设计是让主 VM 和备份 VM 具有单独的(非共享的)虚拟磁盘。在这种设计中,备份 VM 会对其虚拟磁盘执行所有的磁盘写操作,并且在这样做时,它自然会保持其虚拟磁盘的内容与主 VM 的虚拟磁盘的内容同步。图 4 说明了这种配置。在非共享磁盘的情况下,虚拟磁盘被认为是每个 VM 的内部状态的一部分。因此,主 VM 的磁盘写操作不必根据输出规则进行延迟。当主 VM 和备份 VM 无法访问共享存储时,非共享设计非常有用。这可能是因为共享存储不可用或过于昂贵,或者因为运行主 VM 和备份 VM 的服务器相距甚远(“长距离FT”)。非共享设计的一个缺点是,当首次启用故障容错时,必须以某种方式显示同步虚拟磁盘的两个副本。此外,在发生故障后,磁盘可能会不同步,因此备份 VM 在故障重启后必须进行显式地同步。也就是说,FT VMotion 不仅必须同步主 VM 和备份 VM 的运行状态,还必须同步它们的磁盘状态(因为磁盘状态也是虚拟机复制状态的一部分)。
在这种非共享磁盘的配置下,也能应付脑裂场景,在这种场景中,系统能够使用一些其他的外部决策者,例如两个服务器都可以与其通信的第三方服务器(例如,可以使用权威的第三方服务器上的 Test-And-Set 服务)。如果服务器是具有多个节点的集群的一部分,则系统可以使用基于集群关系的 majority 算法。在这个例子中,只有在运行在包含大多数节点的通信子群中的服务器上的 VM 才被允许上线(与 Raft 算法类似,只允许运行在具有过半节点的网络分区中大的 VM 上线,可以避免脑裂)。
4.2 Executing Disk Reads on the Backup VM
在我们的默认设计中,备份 VM 不会从虚拟磁盘(无论是共享还是非共享)读取。由于磁盘读取被视为输入(因为虚拟磁盘也是通过网络读取的,因此磁盘读取与普通的到达的网络数据包的本质一样,可以被视为外部输入),因此通过日志通道将磁盘读取的结果发送到备份 VM 是很自然的。
一种替代的设计是让备份 VM 执行磁盘读取操作,从而消除磁盘读取数据的日志记录。这种方法可以大大减少具有大量磁盘读取工作负载的日志通道上的流量。不过,这种方法有一些麻烦的地方。它可能会降低备份 VM 的执行速度,因为备份 VM 必须执行所有的磁盘读取,当到达 VM 执行执行序列中主 VM 已经完成的位置时,如果备份 VM 上的磁盘读取还没有完成就必须等待。(这里的目的也是这样可以保证备份 VM 执行的指令不会超过主 VM,导致备份 VM 可能无法在指令流中的相同位置执行来自主 VM 同步的非确定型操作/事件)
此外,必须进行一些额外的工作来处理失败的磁盘读取操作。如果主 VM 的磁盘读取成功,但备份 VM 的磁盘读取失败,则必须重试备份 VM 的磁盘读取,直到它成功为止,因为备份 VM 必须保持和主 VM 在内存中有相同数据。相反,如果主 VM 的磁盘读取失败,则必须通过日志记录通道将目标内存的内容发送到备份 VM,因为内存的内容将是不确定的,不能被备份 VM 成功的磁盘读取复制。
最后,如果使用非共享磁盘配置来进行磁盘读取,还有一个小问题。如果主 VM 对特定的磁盘位置进行读取,然后很快又在同一磁盘位置进行写入,那么磁盘写入必须延迟到备份 VM 执行了第一个磁盘读取操作(这里应该也是为了满足输出规则,避免备份 VM 以与主 VM 不一致的状态继续运行)。这种依赖关系可以被检测并正确处理,但会增加实现的复杂性。
在 5.1 节中,对于实际的应用而言,我们给出一些性能结果以表示在备份 VM 上执行磁盘读取会造成一些轻微的吞吐量减少(1-4%),因此在日志通道的带宽被限制的情况下,在备份 VM 上执行磁盘读取可能是有用的。
5. PERFORMANCE EVALUATION
在这节中,我们做了一次 VMware FT 性能的基础评估,针对许多应用负载以及网络基准。为了得到这些结果,我们在一样的服务器上运行主备 VM,每个都带 9 个Intel Xeon 2.8Ghz CPUs 和 8Gbytes of RAM。服务器间通过10 Gbit/s的交换机连接,但是在所有的例子中都能看到被使用的网络带宽远远少于 1Gbit/s。从一个通过标准的 4Gbit/s 的光纤通道网络连接的 EMC Clariion 中,服务器可以连接他们的共享虚拟磁盘。客户端通过 1 Gbit/s 的网络来驱动一些连接服务器的工作负载。
我们评估性能结果的应用如下所示。SPECJbb2005 是工业标准的 Java 应用基准,非常耗费 CPU 和内存,但是 IO 非常少。Kernel Compile 是一种运行 Linux 核编译的工作负载。由于许多编译过程的创建和毁灭,这个工作负载做很多磁盘读取和写入,是非常耗费 CPU 和 MMU 的。Oracle Swingbench 是被 Swingbench OLTP 工作负载(在线事务处理)驱动的一个 Oracle 11g 的数据库。这个工作负载做连续的磁盘和网络 IO,有 80 个同时在线的数据库会话。MS-SQL DVD Store 是一种工作负载,运行了一个 Microsoft SQL Server 2005 的数据库,有 60 个同时在线的客户端。
5.1 Basic Performance Results
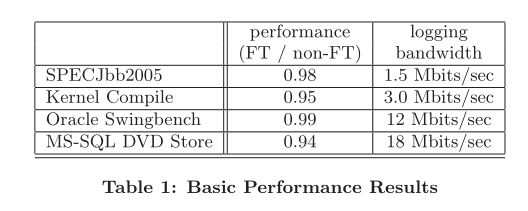
表 1 列出了基本的性能结果。对于每个应用程序,第二列给出了应用程序的性能比例,运行服务器工作负载的虚拟机上启用和未启用FT的情况。性能比小于 1 表示带FT的工作负载更慢。显然,这些有代表性的工作负载上启用FT 的开销小于10%。 SPECJbb2005 完全受计算限制,没有空闲时间,但其表现性能良好,因为它具有最小的除定时器中断以外的不确定性事件。另一个工作负载做磁盘 IO 有一些空闲时间,所以一些 FT 开销可能被 FT虚拟机的空闲时间更少的真实情况隐藏。然而,一般的结论是 VMware FT 能够支持故障容忍 VM,并且具备相当低的性能开销。
出了当应用程序正在运行时,在日志通道上发送数据的平均带宽。对于这些应用程序,日志带宽相当合理,1 Gbit/s 的网络就能满足 。事实上,低带宽要求表明多个 FT 工作负载可以共享相同的 1 Gbit/s 网络,同时没有任何负面的性能影响。
对于运行常见操作系统的 VM,例如 Linux 和 Windows,我们发现当操作系统空闲时,通常的日志记录带宽为 0.5-1.5 Mbits/sec。"空闲"带宽主要是记录定时器中断发送的结果。对于具有活动中工作负载的 VM 而言,日志带宽由网络和必须发送到备份的磁盘输入主导—网络收到的数据包和从磁盘读取的磁盘块。因此,对于非常高的网络接收或者磁盘读取带宽的应用而言,日志带宽高于表1中的测量值。对于这类应用而言,日志通道的带宽可能是瓶颈,特别是日志通道还有其他使用时。
对于许多实际应用程序而言,日志记录所需的带宽相对较低,这使得基于重放的故障容忍对于使用非共享磁盘的长距离配置非常有吸引力。对于远距离配置而言,其主备VM可能相隔 1-100 公里,光纤可以轻松地支持延迟小于 10 毫秒的 100-1000 Mbit/s 带宽。对于表 1 中的应用而言,主备之间的额外往返延迟,可能会导致网络和磁盘输出最多延迟 20 毫秒。远距离配置仅适用于这类应用程序:他的客户端可以容忍每个请求的额外延迟。
对于两个最占用磁盘空间的应用程序,我们测量了在备份 VM上执行磁盘读取(如第 4.2 节所述)与通过日志记录通道发送磁盘读取数据相比,对于性能的影响。对于 Oracle Swingbench 来说,在备份 VM 上执行磁盘读取时的吞吐量降低约 4%;对于 MS-SQL DVD 存储,吞吐量约降低 1%。同时,Oracle Swingbench 的日志带宽从 12 Mbits/sec 降低到 3 Mbits/sec,MS-SQL DVD 存储从 18 Mbits/sec 降低到 8 Mbits/sec。显然,对于具有更大磁盘读取带宽的应用程序,带宽可能会节省很多。如第 4.2 节所述,预计在备份 VM 上执行磁盘读取时,性能可能会更差。但是,对于日志通道的带宽是有限的(例如,远程配置)情况下,在备份 VM 上执行磁盘读取可能有用。
5.2 Network Benchmarks
出于多种原因。网络基准测试对我们的系统来说非常具有挑战性。第一,高速网络会有一个非常高的中断率,这需要以非常高的速度记录和重放异步事件。 第二,以高速率接收数据包的基准将导致高速率的日志流量,因为所有这些数据包必须通过日志通道发送到备份。第三,发送数据包的基准测试将受制于输出规则,延迟网络数据包的发送直到已收到来自备份VM的确认。 此延迟会增加对客户端测量的延迟。这种延迟还可能会降低到客户端的网络带宽,因为网络协议(如 TCP)由于往返延迟增加,可能不得不降低网络传输速率。
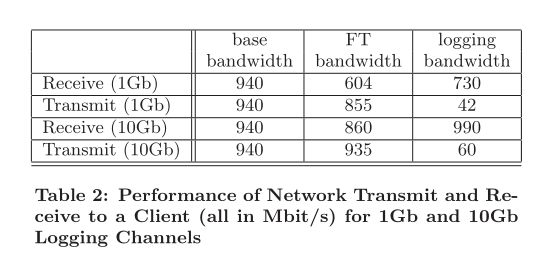
表 2 给出了我们通过标准的 netperf 基准测试,多次测量的结果。在所有这些测量中,客户端 VM 和主 VM 通过 1 Gbit/s 网络连接。前两行给出了主备主机间通过 1 Gbit/s 的日志通道连接时,发送和接收的性能。第三行和第四行给出当主备服务器通过 10 Gbit/s 的日志通道连接时,发送和接收的性能,不仅带宽更高,延迟也低于 1 Gbit/s。作为一个粗略的测量,在 1 Gbit/s 网络连接的管理程序之间, ping 时间约为 150 微秒,而对于 10 Gbit/s 连接,ping 时间大约需要 90 微秒。
未启用 FT 时,主 VM 对于接收和发送,可以实现接近 (940 Mbit/s) 1 Gbit/s 的线路传输速率。当为接收工作负载启用 FT 时,日志记录带宽非常大,因为所有传入的网络数据包必须在日志通道上发送。因此,日志记录通道可能成为瓶颈,正如 1 Gbit/s 日志网络的结果。对于 10 Gbit/s 的日志网络,影响则小了很多。当为上传工作负载启用 FT 时,上传数据包的数据不会记录,但仍必须记录网络中断。日志带宽要低得多,因此可实现的网络上传带宽高于网络接收带宽。总的来说,我们看到 FT 在非常高的上传和接收速率情况下,可以显著地限制网络带宽,但仍然可以实现很高的速率。
6. RELATED WORK
Bressoud 和 Schneider[3] 描述了实施的最初想法,通过完全包含在管理程序级别的软件对虚拟机进行故障容忍。他们展示了保持一个备份虚拟机的可行性,该备份通过配备 HP PA-RISC 处理器的服务器原型与主虚拟机同步。但是,由于 PA-RISC 架构的限制,他们无法实现完全安全、隔离的虚拟机。此外,他们没有实现任何故障检测方法,也没有尝试解决第 3 节中描述的任何实际问题。更重要的是,他们对他们的 FT 协议提出的很多限制是不必要的。首先,他们强加了 epoch 的概念,其中异步事件被延迟到设定的时间间隔结束。一个 epoch 的概念是不必要的—他们可能强加了它,因为他们无法足够有效地重放单个异步事件。其次,他们要求主虚拟机基本上停止执行,直到备份收到并且确认所有以前的日志条目。然而,只有输出本身(例如网络数据包)必须延迟主 VM 本身可能会继续执行。
Bressoud[4] 描述了一个在操作系统(Unixware)中实现故障容忍的系统,因此为在该操作系统上运行的所有应用程序提供容错。系统调用接口变成了必须确定性地复制的一组操作。这项工作与基于管理程序的工作有着相似的限制与设计选择。
Napper等人 [9] 以及 Friedman 和 Kama[7] 描述了故障容忍 Java 虚拟机的设计。他们在日志通道中发送输入与非确定性操作时遵循与我们类似的设计。像 Bressoud 一样,他们似乎并不专注于检测故障并在故障后重新建立容错。此外,它们的实现仅限于对在 Java 虚拟机中运行的应用程序提供故障容忍。这些系统试图处理多线程 Java 应用程序的问题,但要求所有数据都正确地受锁保护或强制执行序列化到共享内存。
Dunlap等人[6]描述了确定性重放的实现,主要针对在半虚拟化系统上调试应用软件。我们的工作支持在虚拟机内运行的任何操作系统并实现了对这些 VM 的容错支持,这需要更高水平的稳定性和性能。
Cully等人[5] 描述了一种支持故障容忍 VMs 的替代方法,并且在一个名为 Remus 的项目里实现了。通过这种方法,在执行期间主 VM 的状态被反复检查,并且被发送到备份服务器,该服务器收集检查点信息。检查点必须非常频繁地执行(每秒多次),因为外部输出必须延迟到下一个检查点被发送和确认。这种方法的优点是它同样适用于单处理器和多处理器 VM。
这种方法的主要问题是有非常高的网络带宽需要,以将每个检查点内存状态的增量更改发送出去。 Remus 的结果[5] 显示,对于发送内存状态的改变,当使用一个 1 Gbit/s 网络连接尝试每秒做 40 个检查点时,内核编译与 SPECweb 基准测试减速 100% 到 225%。有许多优化可能有助于减少所需的网络带宽,但不清楚 1 Gbit/s 连接是否可以实现合理的性能。相比之下,我们基于确定性重放的方法可以实现低于 10% 的开销,在几个真实应用中主备主机所需的带宽远远少于 20 Mbit/s。
7. CONCLUSION AND FUTURE WORK
我们在 VMware vSphere 中设计并实施了一个高效完整的系统(FT),用于为服务器上运行的虚拟机提供容错。我们的设计基于复制主 VM 中的执行,再通过另一台主机上的备份 VM 执行 VMware 确定性重放。如果运行主 VM 的服务器出现故障,备份 VM 能立即接管且不会中断或丢失数据。
总体而言,在商业硬件上运行 VMware FT 时,故障容错 VM 的性能非常出色,并且对于某些典型应用程序,其开销低于 10%。大多数 VMware FT 的性能开销来自于使用 VMware 确定性重放来保持主备 VM 同步。因此,VMware FT 的低开销来源于 VMware 确定性重放的高效率。此外,保持主备 VM 同步所需的日志带宽非常小,通常小于 20 Mbit/s。因为日志带宽在大多数情况下很小,主备 VM 相隔很长的距离(1-100公里)似乎也是可行的实施配置。因此,VMware FT 可用于这种场景:可以防止整个站点发生故障的灾难。值得注意的是,日志流通常是可压缩的,因此简单的压缩技术可以显著地减少日志带宽,虽然有少量额外的 CPU 开销。
我们对 VMware FT 的结果表明,一个高效的故障容错 VM 的实现可以建立在确定性重放的基础上**。**这样的系统可以透明地为运行任何操作系统和应用的虚拟机提供容错能力,仅会带来极小的开销。然而,对客户有用的故障容错 VM 系统而言,它必须还具有强大、易于使用和高度自动化的特点。一个可用的系统除了复制虚拟机执行之外,还需要许多其他组件。特别是 VMware FT 故障后自动地恢复冗余,通过在本地集群中找到合适的服务器并在其上创建一个新的备份 VM。通过解决所有必要的问题,我们已经展示了一个在客户的数据中心可用于实际应用的系统。
通过确定性重放实现容错的权衡之一是当前确定性重放仅针对单处理器 VM 。然而,单处理器虚拟机足够应付各种各样的工作负载,特别是因为物理处理器不断变得更加强大。此外,许多工作负载可以通过使用许多单处理器的虚拟机来扩展,而不是通过使用一个更大的多处理器虚拟机来扩展。多处理器 VM 的高性能重放是一种活跃的研究领域,并且可以潜在地被微处理器中的一些额外硬件支持。一个有趣的方向可能是扩展事务内存模型以促进多处理器重放技术。
将来,我们也有兴趣扩展我们的系统来处理部分硬件故障。如果发生部分硬件故障,我们的意思是服务器上功能或冗余的部分丢失,不会导致损坏或丢失数据。一个例子是到 VM 所有网络连接的丢失,或在物理服务器中备用电源丢失。如果在运行主 VM 的服务器上发生部分硬件故障,在许多情况下(但不是 all) 故障转移到备份 VM 将是有利的。这样的故障转移对于关键 VM 而言,可以立即恢复完整服务,并确保虚拟机从可能不可靠的服务器上快速地移走。
8. Acknowledgments
我们要感谢 Krishna Raja,他做出了许多性能结果。在 VMware FT 实现中有许多人参与。确定性重放的核心实现者(包括对各种虚拟设备的支持)和基本 FT 功能的实现者包括 Lan Huang、Eric Lowe、Slava Malyugin、Alex Mirgorodskiy、Kaustubh Patil、Boris Weissman、Petr Vandrovec 和 Min Xu。此外,在 VMware vCenter 中管理 FT 的高级管理层也有许多人员参与。Karyn Ritter 在管理大部分工作方面做得非常出色。
9. REFERENCES
Alsberg, P., and Day, J. A Principle for Resilient Sharing of Distributed Resources. In Proceedings of the Second International Conference on Software Engineering (1976), pp. 627–644.
AMD Corporation. AMD64 Architecture Programmer’s Manual. Sunnyvale, CA.
Bressoud, T., and Schneider, F. Hypervisor-based Fault Tolerance. In Proceedings of SOSP 15 (Dec. 1995).
Bressoud, T. C. TFT: A Software System for Application-Transparent Fault Tolerance. In Proceedings of the Twenty-Eighth Annual International Symposium on Fault-Tolerance Computing (June 1998), pp. 128–137.
Cully, B., Lefebvre, G., Meyer, D., Feeley, M., Hutchison, N., and Warfield, A. Remus: High Availability via Asynchronous Virtual Machine Replication. In Proceedings of the Fifth USENIX Symposium on Networked Systems Design and Implementation (Apr. 2008), pp. 161–174.
Dunlap, G. W., King, S. T., Cinar, S., Basrai, M., and Chen, P. M. ReVirt: Enabling Intrusion Analysis through Virtual Machine Logging and Replay. In Proceedings of the 2002 Symposium on Operating Systems Design and Implementation (Dec. 2002).
Friedman, R., and Kama, A. Transparent Fault-Tolerant Java Virtual Machine. In Proceedings of Reliable Distributed System (Oct. 2003), pp. 319–328.
Intel Corporation. IntelAˆ R 64 and IA-32 Architectures Software Developer’s Manuals. Santa Clara, CA.
Napper, J., Alvisi, L., and Vin, H. A Fault-Tolerant Java Virtual Machine. In Proceedings of the International Conference on Dependable Systems and Networks (June 2002), pp. 425–434.
Nelson, M., Lim, B.-H., and Hutchins, G. Fast Transparent Migration for Virtual Machines. In Proceedings of the 2005 Annual USENIX Technical Conference (Apr. 2005).
Nightingale, E. B., Veeraraghavan, K., Chen, P. M., and Flinn, J. Rethink the Sync. In Proceedings of the 2006 Symposium on Operating Systems Design and Implementation (Nov. 2006).
Schlicting, R., and Schneider, F. B. Fail-stop Processors: An Approach to Designing Fault-tolerant Computing Systems. ACM Computing Surveys 1, 3 (Aug. 1983), 222–238.
Schneider, F. B. Implementing fault-tolerance services using the state machine approach: A tutorial. ACM Computing Surveys 22, 4 (Dec. 1990), 299–319.
Stratus Technologies. Benefit from Stratus Continuing Processing Technology: Automatic 99.999% Uptime for Microsoft Windows Server Environments. At http://www.stratus.com/˜/media/- Stratus/Files/Resources/WhitePapers/continuous- processing-for-windows.pdf, June 2009.
Xu, M., Malyugin, V., Sheldon, J., Venkitachalam, G., and Weissman, B. ReTrace: Collecting Execution Traces with Virtual Machine Deterministic Replay. In Proceedings of the 2007 Workshop on Modeling, Benchmarking, and Simulation (June 2007).